
「AIロボットを作ってみたいけど、何から手を付けよう?」
前回の記事では、個人でAIロボットを作る前に必ず知っておくべき基本事項や、Raspberry Pi 5とAIを組み合わせる可能性についてお伝えしました。まだ読んでいない方は是非読んでみてください!

今回は「Raspberry Pi 5でAIロボットを始めるための具体的な環境構築手順」を徹底解説します!
「AIロボットを作ってみたいけど、何から実施すればよいかわからない」「ROS 2とChatGPTをどう連携させるの?」といった疑問をすべて解決できるよう、おすすめのRaspBerry Piの紹介、Ubuntuの書き込み、ROS 2のインストール、そしてOpenAI APIを使った実践的なコード実行まで、一連の流れを「最小構成」でまとめました。
この記事を読み終える頃には、あなたのラズパイが「意思を持つロボットの脳」として動き出しているはずです。それでは、実際に手を動かして開発をスタートしましょう!
この記事で分かること
・ラズパイを使った初期環境の構築方法(約2時間で完了)
・AIとロボット基盤の接続方法
1. Raspberry Piキットの購入
まずはRaspberry Pi(ラズパイ)を購入しよう。このラズパイが、ロボット基盤のスタンダードとなります。
私のお勧めは、ラスパイ本体に加え、USB電源をはじめとする、ラズパイを動作させるのに必要な周辺機器がセットで入ったツールを購入することです。
数あるツールの中でも「TRASKIT 8GB スターターキット(8GB RAM / 64GB microSD付き)」が私のお勧めです!このキットを用いた環境構築方法を記載していきます!
実際に使用したキットはこちら:
👉 TRASKIT Raspberry Pi 5 スターターキット(Amazon)

実際の購入データメモ
Amazon注文日3/26、価格32,900円、配送日3/28。
2日で到着し、開封と同時に作業開始できた。
2. 環境構築
ここからは、実際にTRASKIT Raspberry Pi 5 スターターキットを購入し、ROS2の環境構築を行った際の記録を掲載していきます。
2-0. スターターキットの中身確認
実際の開封内容を確認すると、初期構築に必要なものは一通り揃っています。
想定よりもコンパクトな箱で配送されました。

STARTER KIT内には、他にいくつかの箱が入ってます。
① ケース・周辺機器一式
ケース本体、64GBのmicroSDカード、冷却ファン、カードリーダー、+ドライバーが同梱されている。

② 電源アダプター
汎用的なUSB-C電源。Raspberry Pi 5は電源要件が高いが、27W対応のアダプターが付属しており、別途購入の必要がないのは大きい。
③ Raspberry Pi 5本体
本体は別箱で梱包されている。

④ケーブル・説明書
その他、説明書やケーブル類も同封されていた。

2-1. Ubuntu 24.04 LTS の書き込み
所要時間: 約10分
Raspberry Pi Imagerを使ってmicroSD 64GBにUbuntu 24.04 LTSを書き込んでいきます。TRASKITキットに付属のRaspberry Pi OSは使わない。理由はROS2 JazzyがUbuntu 24.04を推奨環境としているためです。
書き込み手順は以下の通り:
1. Raspberry Pi Imager v2.0.7をダウンロード・インストール
以下サイトから、使用しているPCのOSに合わせてダウンロードする。インストールも適宜実施。

2.Micro SDをPCに挿入
付属のカードリーダーを使用することで、microSDカードをUSB Type-C経由でPCに接続できる。

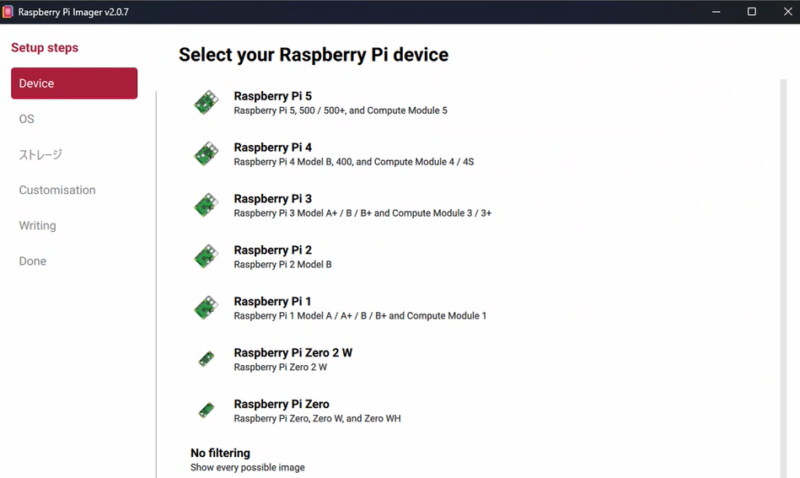
3.Device・OSを選択
以下順序で、Device・OSを選択する。
Device:「Raspberry Pi 5」
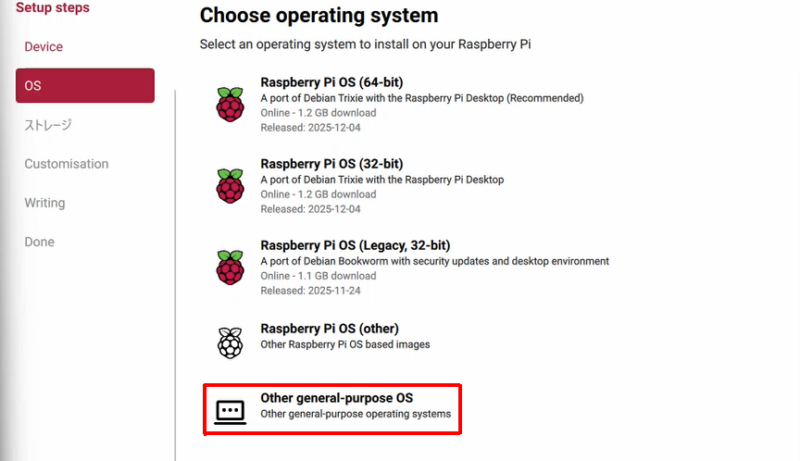
OS:「Other general-purpose OS」→「Ubuntu」→「Ubuntu Server 24.04 LTS(64-bit)」の順に選択
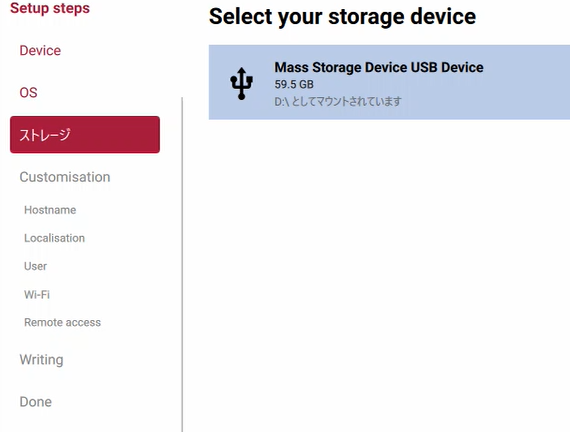
4. ストレージを選択
ストレージに「MicroSD」を選択。
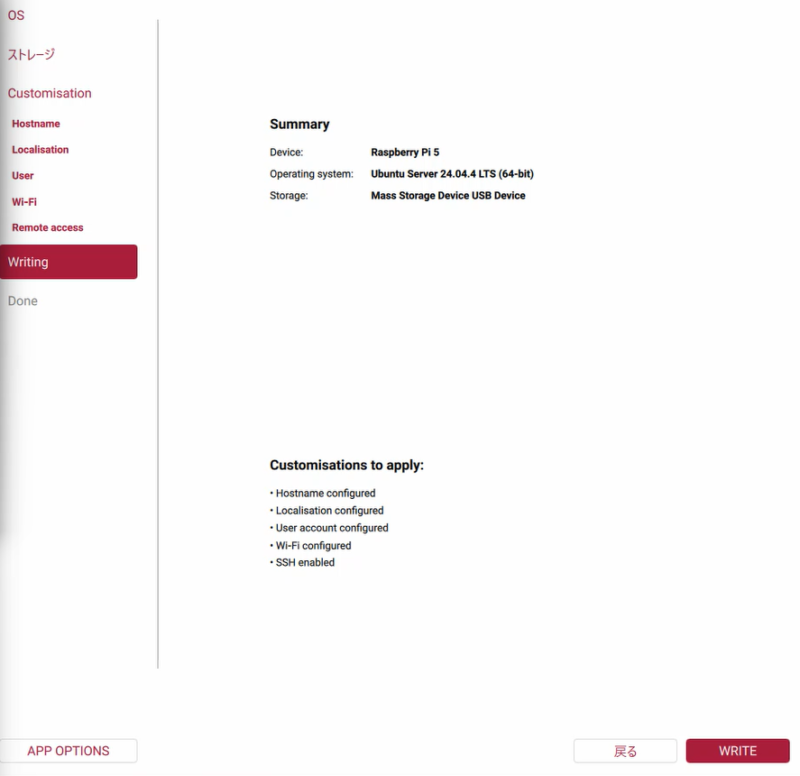
5. 詳細設定・書き込み実行
以下を設定し、「WRITE」ボタンを押す。
ホスト名:任意
ユーザー名:任意
SSH有効化: ON(パスワード認証)
Wi-Fi設定(SSID・パスワード・国:JP)
タイムゾーン: Asia/Tokyo
詰まったポイント:
TRASKITキットには最初からRaspberry Pi OS関連ファイルが入っているが、これは全て上書きされるので問題なし。重要なのはSSH設定とWi-Fi設定を確実に行うことだ。
2-2. ハードウェア起動とSSH接続
所要時間: 約20分
1. microSDをPi5に挿入
Raspberry Pi 5 の裏側にスロットがある。カチッと奥まで入れる。

2. USB-C電源接続
Pi5に電源を接続することでPi5が起動する。USB-C電源を、左下に挿入すると、緑のLEDが点滅を開始する。

詰まったポイント:
電源の入れ込みは結構固く、入れ込みが甘いとLEDが点灯しない。力加減に注意。
3. 3分程度待機
初期セットアップが内部で実行されるため、電源接続したまま待機する。
セットアップ完了を確かめる合図が特段ないので、3分待つのが確実。時間が経つにつれLEDの点滅頻度が少なくなっていくように感じたが、断定はできない。
4. SSH接続(Windowsの場合)
この作業から、PCを使ってコマンドを打って環境構築を行っていきます。PowerShellを開き、以下コマンドを入力。4-1で設定したユーザー名とホスト名が必要。
ssh (ユーザー名)@(ホスト名).local「Are you sure you want to continue connecting?」と聞かれたら「yes」を入力し、4-1で設定したパスワードを入力。「(ユーザー名)@(ホスト名):~$ 」がPowerShell上に表示されれば成功である。
パスワードを入力しても画面上には表示されないのが正常。
2-3. Ubuntu初期設定
所要時間: 約15分(再起動の時間含む)
1.パッケージ更新
以下コードをPowerShellに打ち込み、パッケージを更新する。
sudo apt update
sudo apt upgrade -y一部パッケージ更新のため再起動が必要なため、以下を実行。
sudo reboot再起動後、再度SSH接続する。
ssh (ユーザー名)@(ホスト名).local2-4. ROS2 Jazzy のインストール
所要時間: 約30分
ROS2 JazzyはUbuntu 24.04 LTSに対応したバージョンのROSである。
1. ROS2ダウンロード
以下コードを実行。
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg2.リポジトリ登録
以下コードを実行。
echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(. /etc/os-release && echo $UBUNTU_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list > /dev/null3.パッケージ更新
以下コードを実行。
sudo apt update4.インストール
以下コードを実行し、ROS2をインストールする。私の手元の環境だとインストールに失敗したため、私と同様にエラーが出た方は、後続の詰まったポイント・解決方法を参照してほしい。
sudo apt install -y ros-jazzy-ros-base詰まったポイント
インストール時に依存関係エラーが発生した。以下で詳細を記載する。
The following packages have unmet dependencies:
liblz4-dev : Depends: liblz4-1 (= 1.9.4-1build1) but 1.9.4-1build1.1 is to be installed
libzstd-dev : Depends: libzstd1 (= 1.5.5+dfsg2-2build1) but 1.5.5+dfsg2-2build1.1 is to be installed
zlib1g-dev : Depends: zlib1g (= 1:1.3.dfsg-3.1ubuntu2) but 1:1.3.dfsg-3.1ubuntu2.1 is to be installed解決手順
パッケージのダウングレードを実行。自動更新を防止するためパッケージをロックした後、ROS2インストールを実行した。以下で詳細を記載する。
関連パッケージをダウングレード
sudo apt install -y --allow-downgrades \
liblz4-1=1.9.4-1build1 \
libzstd1=1.5.5+dfsg2-2build1 \
zlib1g=1:1.3.dfsg-3.1ubuntu2パッケージをロック(自動更新防止)
sudo apt-mark hold liblz4-1 libzstd1 zlib1gROS2インストール
sudo apt install -y ros-jazzy-ros-baseこれでROS2のインストールが完了しました!
2-5.その他設定
所要時間:約5分
以下コードを順番に実行。
環境設定
echo "source /opt/ros/jazzy/setup.bash" >> ~/.bashrc
source ~/.bashrc開発環境設定
sudo apt install -y python3-colcon-common-extensions python3-rosdep初期化
sudo rosdep init更新
rosdep updateここまでの作業で、ROS2の環境構築は完了である。開発ができる環境が整いました!
3. ChatGPT API連携の準備
最後に、ロボットの判断層でChatGPT APIを使用するための準備を行っていく。
3-1.APIキーの取得
所要時間:約5分
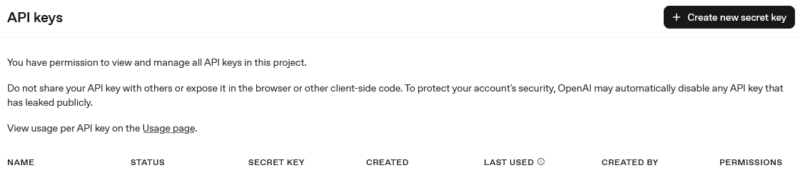
ChatGPTの以下公式サイトから、APIキーを取得する。

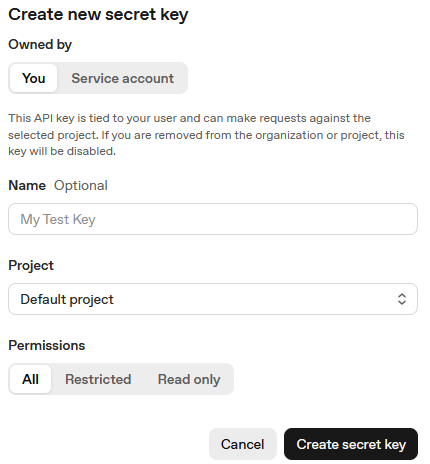
Create new Secret keyをクリックし、Keyの名前を適宜入力し、CreateSecretKeyを押下する。
ここで取得したAPIキーは、忘れないように保存し、外部公開をしないように注意する。
3-2.APIキーの紐づけ
所要時間:約2分
以下を実行し、APIキーをPi5内部で紐づけする。
echo 'export OPENAI_API_KEY="sk-xxxxxxxxxxxxxxxx"' >> ~/.bashrc
source ~/.bashrc3-3.環境構築
所要時間:約5分
pipをインストールする。この際、直接pip installをすることができない為、Venvコマンドで仮想環境を入れる。(仮想環境とは、コンピュータ内で実際のシステムから隔離された独立した環境を作成する技術です。詳細は割愛。)
sudo apt install -y python3-pip python3-venv仮想環境の作成は以下で実行。この辺りはPythonに慣れている方であれば見慣れたコードであると思う。(仮想環境名はchatgpt-envとしているが、任意で変更して構わない)
python3 -m venv ~/chatgpt-env仮想環境に入るコードは以下。
source ~/chatgpt-env/bin/activate仮想環境下で、OpenAIライブラリインストール
pip install openai3-4.テストスクリプト作成
所要時間:約10分
以下コードを実行し、test_chatgpt.pyの編集を行う。
nano test_chatgpt.py後続で現れる画面に、以下をコピペ。コピペ後、Ctrl+O → Enter → Ctrl+Xの順にキーを押下し、ファイル保存。
# test_chatgpt.py
from openai import OpenAI
client = OpenAI()
response = client.chat.completions.create(
model="gpt-4o-mini",
messages=[
{"role": "user", "content": "ROSでできることを初心者向けに教えて"}
]
)
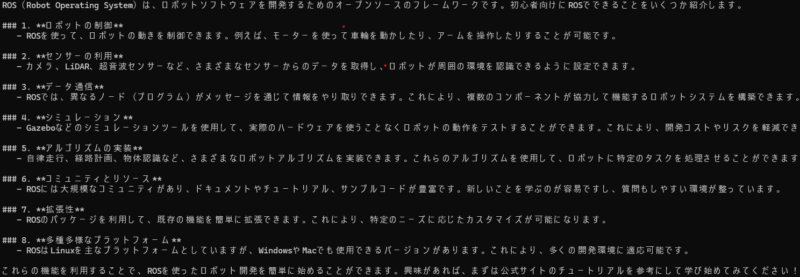
print(response.choices[0].message.content)上のコードは、gpt-40-miniというモデルのAIに、「ROSでできることを初心者向けに教えて」というメッセージを送信し、回答を表示する内容が記載されています。つまり、手元のRaspberry PiからAIに質問の送受信を行っているコードということです!
下記コードを入力すると、先ほど編集したchatgpt.pyが実行されます。
python test_chatgpt.py実行して、以下のように、AIの回答が返ってきたら成功です!
詰まった点
APIに課金していない場合、エラーが出る。2026年4月現在、ChatGPTのAPIキーを使用するためには、課金が必要。以下サイトで課金設定を実施しよう。
https://platform.openai.com/settings/organization/billing
これで、「OpenAI」という強力なAIと、「Raspberry Pi 5」という物理的なロボット基盤が繋がりました!お疲れさまでした!
まとめ
今回の環境構築・OpenAIとの接続で、AIとロボット基盤をつなげることに成功しました!
次回の記事では、今回の環境構築でインストールした「ROS2」について解説を行おうと思います!
